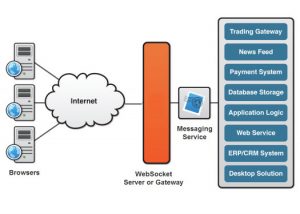
This post describes a nice Android APP developed with buttons to communicate with another device (a computer or raspberry PI) using websocket.
Websocket is a communication protocol here described: https://en.wikipedia.org/wiki/WebSocket
The complete android APP is here available: https://gitlab.com/iptv-updated/websocket_easy
This APP is using the library OkHttp here described:
https://medium.com/@ssaurel/learn-to-use-websockets-on-android-with-okhttp-ba5f00aea988
The APP layout (created with Android Studio) defines the events necessary to send the messages on the network with websocket. The arrows are used to send the command “up”, “down”, “left” and “right” and the other buttons are used to provide flags and values to the server. The buttons “Loop” and “Stop-Loop” are used to activate and deactivate a server side thread.

This client can be easily tested with the follow server developed in python:
https://github.com/Pithikos/python-websocket-server
before to execute the server the host name has to be modified to 0.0.0.0 (instead of 127.0.0.1) to allow the communication with all clients in the local network
here the video:

the server can also be located on Raspberry PI: this is possible using python with the library “Tornado”.
An easy circuit has been after created on Raspberry PI with LEDs and resistors connected to GIOP. The LEDs get actions based on button pushed on Android APP.
[embedyt] https://www.youtube.com/watch?v=pxZu40eGSn0[/embedyt]
Code to Run in Raspberry PI:
import tornado.httpserver
import tornado.ioloop
import tornado.options
import tornado.web
import tornado.websocket
import time
import RPi.GPIO as GPIO
import threading
import subprocess, os
import signal
GPIO.setmode(GPIO.BOARD)
#GPIO.setwarnings(False)
GPIO_sw = 7 #29 # pin 18
GPIO_out = 37
GPIO.setup(GPIO_sw,GPIO.IN,pull_up_down=GPIO.PUD_DOWN)
GPIO.setup(GPIO_out,GPIO.OUT)
#global Dead
#Dead = False
GPIO.setmode(GPIO.BOARD)
GPIO.setup(31, GPIO.OUT)
GPIO.setup(33, GPIO.OUT)
GPIO.setup(35, GPIO.OUT)
GPIO.setup(29, GPIO.OUT)
GPIO.output(31,False)
GPIO.output(33,False)
GPIO.output(35,False)
GPIO.output(29,False)
class LedHandler(tornado.websocket.WebSocketHandler):
def loop(self):
global Dead
while (not Dead):
#print "Motor On"
GPIO.output(31,True)
GPIO.output(33,False)
GPIO.output(35,False)
GPIO.output(29,False)
time.sleep(0.2)
GPIO.output(31,False)
GPIO.output(33,True)
GPIO.output(35,False)
GPIO.output(29,False)
time.sleep(0.2)
GPIO.output(31,False)
GPIO.output(33,False)
GPIO.output(35,True)
GPIO.output(29,False)
time.sleep(0.2)
GPIO.output(31,False)
GPIO.output(33,False)
GPIO.output(35,False)
GPIO.output(29,True)
time.sleep(0.2)
if Dead == True:
GPIO.output(29,False)
def check_origin(self, origin):
return True
def open(self):
global channelValue
global volumeLevel
print "Connection opened from: {}".format(self.request.remote_ip)
self.write_message("Connection opened")
def on_close(self):
print "Connection closed"
def on_message(self, message):
global Dead
global volumeLevel
global channelValue
global channelAddress
global run
global io_loop
global server
if run ==1:
currentState = GPIO.input(31)
print "Message received {}".format(message)
if (message[0] == "{"):
indexComma = message.find(":")
typeVal=message[1:indexComma]
indexClose = message.find("}")
value = message[indexComma+1:indexClose]
#print(typeVal)
#print(value)
if (typeVal == "volume" ):
volumeLevel = value
cmd = subprocess.Popen("sudo mpc volume " + str(value), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
elif (typeVal == "channel" ):
channelValue = value
cmd = subprocess.Popen("sudo mpc play " + str(value), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
channelAddress = ""
elif (typeVal == "radio"):
cmd = subprocess.Popen("sudo mpc clear ", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc add " + str(value), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc play ", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
channelAddress = str(value)
if message == "default":
cmd = subprocess.Popen("sudo /home/pi/pythonexample/playlist.sh", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc play " + str(channelValue), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
elif message == "ledon":
if currentState == True:
self.write_message("LED is already OFF")
else:
GPIO.output(31, True)
GPIO.output(33, True)
GPIO.output(35, True)
GPIO.output(29, True)
elif message == "ledoff":
if currentState == False:
self.write_message("LED is already OFF")
else:
GPIO.output(31, False)
GPIO.output(33, False)
GPIO.output(35, False)
GPIO.output(29, False)
elif message == "stoploop":
Dead = True
elif message == "loop":
if Dead == True:
Dead = False
our_thread = threading.Thread(target=self.loop)
our_thread.start()
elif message == "ledlefton":
GPIO.output(31,False)
GPIO.output(35,True)
#if channelValue > 1:
# channelValue = channelValue - 1
# cmd = subprocess.Popen("sudo mpc play " + str(channelValue), shell=True,stdout=subprocess.PIPE)
# stations = cmd.stdout.readlines()
elif message == "ledleftoff":
GPIO.output(35, False)
elif message == "ledrighton":
GPIO.output(35, False)
GPIO.output(31,True)
#if channelValue < 5:
# channelValue = channelValue + 1
# cmd = subprocess.Popen("sudo mpc play " + str(channelValue), shell=True,stdout=subprocess.PIPE)
# stations = cmd.stdout.readlines()
elif message == "ledrightoff":
GPIO.output(31, False)
elif message == "ledupon":
GPIO.output(29, False)
GPIO.output(33,True)
#if volumeLevel < 100: # volumeLevel = volumeLevel +10 # cmd = subprocess.Popen("sudo mpc volume " + str(volumeLevel), shell=True,stdout=subprocess.PIPE) # stations = cmd.stdout.readlines() elif message == "ledupoff": GPIO.output(33, False) elif message == "leddownon": GPIO.output(29, True) GPIO.output(33, False) #if volumeLevel > 0:
# volumeLevel = volumeLevel-5
# cmd = subprocess.Popen("sudo mpc volume " + str(volumeLevel), shell=True,stdout=subprocess.PIPE)
# stations = cmd.stdout.readlines()
elif message == "leddownoff":
GPIO.output(29, False)
if message == "radiooff" and run==1:
print " Stopped "
GPIO.output(GPIO_out,False)
run = 0
cmd = subprocess.Popen("sudo mpc stop", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
#server.stop()
#io_loop.stop()
elif message == "radioon" and run==0:
print " Started"
GPIO.output(GPIO_out,True)
cmd = subprocess.Popen("sudo mpc volume " + str(volumeLevel), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc play " + str(channelValue), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
run = 1
#our_thread = threading.Thread(target=socketloop)
#our_thread.start()
def socketloop():
global io_loop
global server
try:
tornado.options.parse_command_line()
app = tornado.web.Application(handlers=[(r"/", LedHandler)])
server = tornado.httpserver.HTTPServer(app)
server.listen(8000)
io_loop = tornado.ioloop.IOLoop.instance()
io_loop.start()
except RuntimeError:
print("server already on")
if __name__ == "__main__":
global io_loop
global server
global volumeLevel
global channelValue
global channelAddress
global run
global Dead
volumeLevel=90
channelAddress = ""
channelValue=1
GPIO.output(GPIO_out,True)
time.sleep(0.5)
GPIO.output(GPIO_out,False)
#our_thread = threading.Thread(target=socketloop)
#our_thread.start()
Dead = True
try:
run = 0
while True :
#print GPIO.input(GPIO_sw)
if GPIO.input(GPIO_sw)==True and run == 0:
print channelAddress
print " Started"
GPIO.output(GPIO_out,True)
cmd = subprocess.Popen("sudo /home/pi/pythonexample/playlist.sh", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc volume " + str(volumeLevel), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
if channelAddress <> "":
cmd = subprocess.Popen("sudo mpc clear ", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc add " + channelAddress, shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
cmd = subprocess.Popen("sudo mpc play", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
else:
cmd = subprocess.Popen("sudo mpc play " + str(channelValue), shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
run = 1
try:
server.stop()
io_loop.stop()
except:
print "Caught threadWebsocket. Thread was already off"
our_thread = threading.Thread(target=socketloop)
our_thread.start()
while GPIO.input(GPIO_sw)==True:
time.sleep(0.1)
if GPIO.input(GPIO_sw)==True and run == 1:
print " Stopped "
GPIO.output(GPIO_out,False)
server.stop()
run = 0
cmd = subprocess.Popen("sudo mpc stop", shell=True,stdout=subprocess.PIPE)
stations = cmd.stdout.readlines()
Dead = True
GPIO.output(31,False)
GPIO.output(33,False)
GPIO.output(35,False)
GPIO.output(29,False)
#cmd = subprocess.Popen("sudo ./findkill.sh", shell=True,stdout=subprocess.PIPE)
#stations = cmd.stdout.readlines()
#cmd = subprocess.Popen("chmod 777 ./killall.sh", shell=True,stdout=subprocess.PIPE)
#stations = cmd.stdout.readlines()
#cmd = subprocess.Popen("./killall.sh", shell=True,stdout=subprocess.PIPE)
#stations = cmd.stdout.readlines()
#cmd = subprocess.Popen("rm -f ./killall.sh", shell=True,stdout=subprocess.PIPE)
#stations = cmd.stdout.readlines()
#server.stop()
#io_loop.stop()
while GPIO.input(GPIO_sw)==True:
time.sleep(0.1)
time.sleep(0.1)
except KeyboardInterrupt:
print " Quit"
GPIO.cleanup()
")


 - from command line")

[…] websocket_easy: easy comunication between Android App and Computer or Raspeberry PI […]